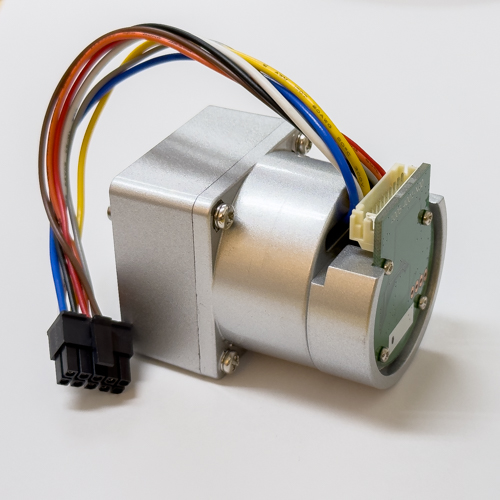
汎用BLDCモータをサーボモータ化できるドライバー基板
従来のサーボドライバーは専用モータとの組み合わせが必要でした。AMVITO DRIVER-1 (アンビトドライバーワン)は、アンビト製回転角度センサーを併用することで、汎用のBLDCモータをサーボモータ化できます。これにより、制御用のモータの選択肢を広げることができます。
簡易補間位置制御を内蔵
AMVITO DRIVER-1 は位置制御と速度制御を切り替えることが可能です。位置制御では、台形加減速による簡易的な補間制御を行う PTP(Point to Point)モードと、補間制御を行わずにダイレクトな指令値入力が可能なRaw モードがあります。PTP モードを使うと、 加減速制御を伴う駆動系を素早く開発することができます。また Raw モードは、独自のモーションコントロールの開発などに活用で きます。
Easy Programming
プラグラミング言語 Python を用いて、AMVITO DRIVER-1 に指令値を与えるためのクライアントソフトウェアを素早く開発することができます。最短4行で通信確立から位置制御モードでのサーボオンまでの動作を実現できます。
Pythonコードの例 (通信確立からサーボオンまで)
from pymodbus.client import ModbusSerialClient
client = ModbusSerialClient(baudrate=115200, port=" シリアルポート ", method="rtu")
client.connect()
res_write = client.write_coils(address=” コイルアドレス” , values=[True], slave=” 局番” )Modbus RTU・デイジーチェーンに対応
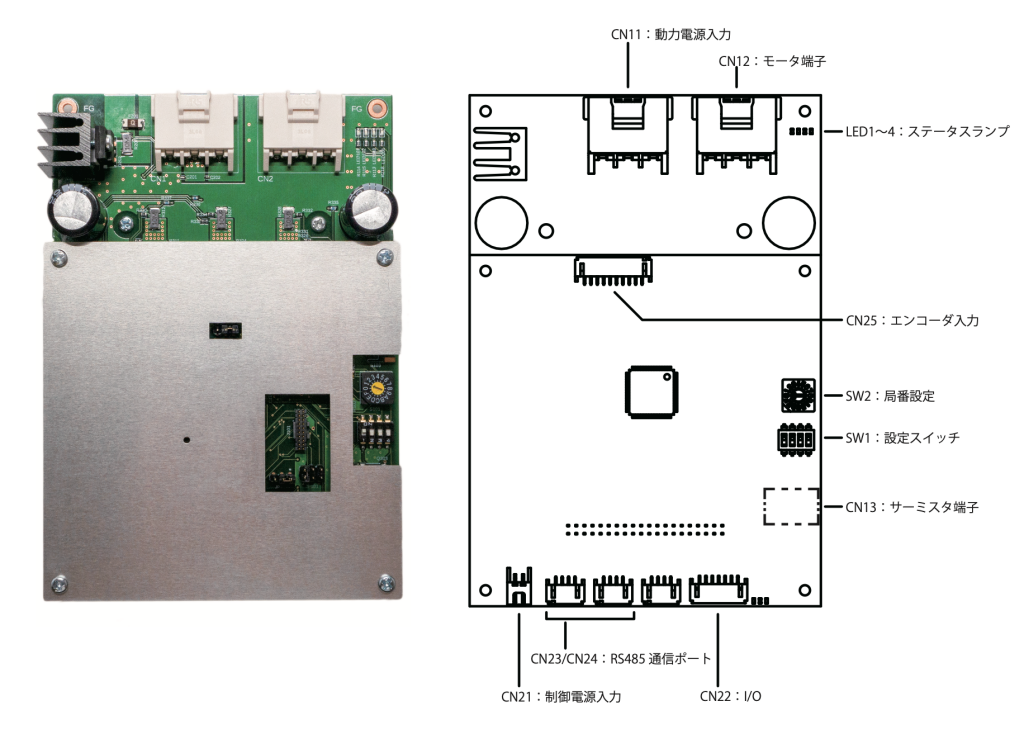
AMVITO DRIVER-1 への指令値等の操作は RS-485 を介した Modbus RTU 通信により行います。Modbus 上のコイル操作で、 モード切り替え、サーボオン、サーボオフ、エラーリセットなどを行うことができます。レジスタへの書き込みで指令値や各種設定値の送信を行います。レジスタの読み取りで、現在座標やエラーコードなどのフィードバック情報などを取得できます。また、通信ラインはデイジーチェーン接続に対応しており、省配線化に貢献します。同一ラインに最大 15 台の AMVITO DRIVER-1 を接続することが 可能です。

ROS/ROS2に対応予定
AMVITO DRIVER-1は、ROS/ROS2に対応したノードを公開する予定です。これを使用すると、AMVITO DRIVER-1をROS上で扱いやすくなります。最新情報は本ウェブサイトで発信します。
マニュアル・FAQ
現在準備中です。近日公開します。
スペック
| 製品名 | AMVITO DRIVER-1 (アンビト ドライバーワン) |
| 外形寸法 | W110 x D160 x H32 mm |
| 電源 | 制御電源:DC5V 動力電源:DC24 ~ 48V |
| 容量 | 250W |
| 対応モータ | BLDCモータ(8極以下) |
| センサ仕様 | インクリメンタルエンコーダ (アンビト製回転角度センサー) |
| 指令入力 | Modbus RTU over RS-485 (115.2kbps, 8-N-1) |
| 制御モード | 位置制御(補間あり、なし切り替え) 速度制御 |
| エラー機能 | 過電圧、過電流、過速度、電圧低下、サーマルエラー、誤差過大 等 |
| 入出力信号 | 入力:イネーブル信号 出力:エラー信号 |
オプションパーツ
現在準備中です。
パンフレット
外観

お問い合わせ
ご購入、ご質問等のお問い合わせはこちらからお願いいたします。